

")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")

Плата создана на базе микросхемы DRV8834 компании TI - драйвера биполярного шагового двигателя. Она имеет распиновку и интерфейс, которые почти идентичны модулям на A4988, поэтому его можно использовать в качестве замены этих плат во многих приложениях. DRV8834 работает от 2,5-10,8 В, что позволяет питать шаговые двигатели от напряжения, слишком низкого для других драйверов, и может непрерывно обеспечивать до примерно 1,5 А на фазу без радиатора или принудительного воздушного охлаждения (до 2 А пиковое значение). Он имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошаговых разрешений (вплоть до 1/32 шага). Эта плата поставляется в комплекте c не припаянными штыревыми разъемами 2,54 мм.
Драйвер создан на базе микросхемы управления шаговым двигателем компании TI DRV8834, изготовленной по ДМОП-технологии с регулятором и защитой по току, поэтому мы настоятельно рекомендуем, перед использованием этого продукта, ознакомиться со спецификацией DRV8834 (3,56MB pdf). Этот драйвер позволит управлять биполярным шаговым двигателем с выходным током до 2 А на обмотку (для получения дополнительной информации смотрите раздел о рассеивании мощности). Ниже приведены ключевые особенности драйвера:
Этот продукт поставляется со всеми компонентами поверхностного монтажа, включая микросхему драйвера DRV8834, установленных как показано на изображении.
В качестве альтернативных драйверов шаговых двигателей, совместимых по выводам, которые работают с более высокими напряжениями питания двигателя, рассмотрите модули Pololu DRV8825 и A4988.
Некоторыми однополярными шаговыми двигателями (например, с шестью или восемью выводами) можно управлять с помощью этого драйвера как биполярными. Для получения дополнительной информации. Драйвер нельзя использовать для управления униполярными двигателями с пятью выводами.
В комплект входятВилка штыревая прямая 1x16 шаг 2,54 мм. Вы можете припаять разъёмы прямо к плате и использовать со стандартными макетными и монтажными платами с расстоянием между выводами 2,54 мм, либо припаять провода прямо на плату для более компактной конструкции.
 |
 |
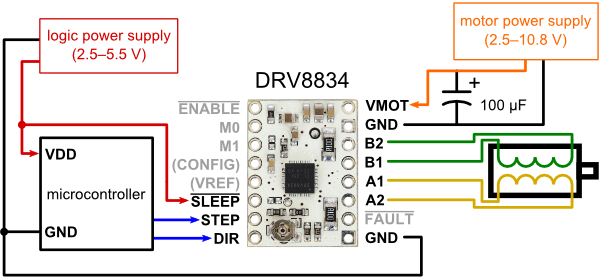
Драйвер требует, чтобы напряжение питания двигателя 2,5-10,8 В было подключено к VMOT и GND. Этот источник питания должен иметь соответствующие разделительные конденсаторы рядом с платой, и он должен обеспечивать предполагаемый ток шагового двигателя.
| Внимание: В плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает её уязвимой для индуктивно-ёмкостных скачков напряжения, особенно если питающие провода длиннее нескольких сантиметров. В некоторых случаях, даже при напряжении питания двигателя всего в 9 В, эти скачки могут превысить максимально допустимое значение (11,8 В для DRV8834) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате. |
При правильном подключении, через Pololu DRV8834 можно управлять четырёх-, шести- и восьми- проводными шаговыми двигателями.
| Внимание: Соединение или разъединение шагового двигателя при включённом драйвере может привести к поломке двигателя. |
У шаговых двигателей обычно установлена конкретная величина (например 1,8° или 200 шагов на оборот), при которой достигается полный оборот в 360°. Микрошаговый драйвер, такой как DRV8834 позволяет увеличить разрешение за счёт возможности управления промежуточными шагами. Это достигается путём возбуждения обмоток средней величины тока. Например, управление мотором в режиме четверти шага даст двигателю с величиной 200-шагов-за-оборот уже 800 микрошагов при использовании разных уровней тока.
Разрешение (размер шага) задаётся комбинациями переключателей на входах (M0, и M1). M0 по умолчанию плавающий, в то время как M1 имеет внутренний понижающий резистор 200 кОм, поэтому оставление этих двух выводов выбора микрошага отключенными приводит к переходу в 1/4 ступенчатый режим. Для правильной работы в режиме микрошага необходим слабый ток (см. ниже), который обеспечивается ограничителями по току. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
| M0 | M1 | Разрешение микрошага |
|---|---|---|
| Низкий | Низкий | Полный шаг |
| Высокий | Низкий | 1/2 шага |
| Плавающий | Низкий | 1/4 шага |
| Низкий | Высокий | 1/8 шага |
| Высокий | Высокий | 1/16 шага |
| Плавающий | Высокий | 1/32 шага |
Каждый импульс на входе STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном контактом DIR. Оба этих входа по умолчанию подтягиваются к низкому уровню через внутренние понижающие резисторы 200 кОм. Если вам просто нужно вращение в одном направлении, вы можете оставить DIR отключенным.
Чип имеет два разных входа для управления состоянием питания: SLEEP и ENABLE. Подробные сведения об этих состояниях питания смотрите спецификацию. Обратите внимание, что драйвер подтягивает вывод SLEEP к низкому уровню через внутренний понижающий резистор 500 кОм, и он подтягивает вывод ENABLE к низкому уровню через внутренний понижающий резистор 200 кОм. Состояние SLEEP по умолчанию не позволяет драйверу работать; этот вывод должен иметь высокий уровень, чтобы активировать драйвер (он может быть подключен напрямую к логическому "высокому" напряжению от 2,5 до 5,5 В, или им можно динамически управлять, подключив его к цифровому выходу микроконтроллера). Состояние вывода ENABLE по умолчанию - активировать драйвер, поэтому этот вывод можно оставить отключенным.
DRV8834 также имеет выход FAULT, который устанавливает низкий уровень всякий раз, когда полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или теплового отключения, или когда блокировка минимального напряжения отключает микросхему. Плата соединяет этот вывод с выводом SLEEP через резистор 10 кОм, который действует как подтягивание FAULT всякий раз, когда SLEEP внешне удерживается на высоком уровне, поэтому внешнее подтягивание на выводе FAULT не требуется. Обратите внимание, что плата включает в себя защитный резистор 1,5 кОм, последовательно соединенный с выводом FAULT, что позволяет безопасно подключать этот вывод напрямую к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, разработанной для совместимого по выводам A4988 драйвера. В такой системе резистор 10 кОм между SLEEP и FAULT будет затем действовать как подтягивающий для SLEEP, что делает плату DRV8834 более прямой заменой A4988 в таких системах (A4988 имеет внутреннее подтягивание на вывод SLEEP). Чтобы не допустить сбоев в работе вывода SLEEP, любой внешний подтягивающий резистор, который вы добавляете к входу вывода SLEEP, не должен превышать 4,7 кОм.
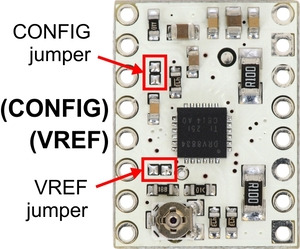
Дополнительные контактные перемычкиВывод CONFIG на DRV8834 может использоваться для выбора между режимом индексатора по умолчанию, который предназначен для управления шаговыми двигателями, и режимом чередования фаз / включения, который можно использовать для управления двумя щеточными двигателями постоянного тока. Он недоступен по умолчанию (во избежание конфликтов при использовании модуля DRV8834 в качестве замены для других аналогичных драйверов шагового двигателя), но его можно подключить к контакту с надписью "(CFG)" путем создания перемычки поверхностным монтажом. Вторая перемычка может быть удалена, чтобы сделать ограничение тока опорного напряжения на выводе с надписью "(REF)".
Для достижения высокой скорости шага мощность двигателя обычно выше, чем допустимо без ограничения активного тока. Например, типовой шаговый двигатель может иметь максимальный номинальный ток 1 А с сопротивлением катушки 5 Ом, что указывает на максимальное питание двигателя 5 В. Использование такого двигателя с 9 В позволит увеличить скорость шага, но ток должен активно быть ограничен до менее 1 А, чтобы предотвратить повреждение двигателя.
DRV8834 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате может использоваться для установки ограничения тока. Обычно вам нужно установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя. Один из способов установить ограничение тока - это перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без синхронизации входа STEP. Измеренный ток будет в 0,7 раза больше предельного тока (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предела тока в полношаговом режиме).
Другой способ установить ограничение по току - измерить напряжение на выводе "ref" и вычислить результирующее ограничение по току (резисторы измерения тока равны 0,100 Ом). Напряжение на выводе ref доступно через переходное отверстие, обведенное кружком на нижней шелкографии печатной платы, или на выводе помеченный "(REF)", если подключена соответствующая перемычка для поверхностного монтажа. Ограничение тока относится к опорному напряжению следующим образом:
Current Limit = Vref × 2
Например, если у вас есть шаговый двигатель рассчитанный на 1 А, вы можете установить ограничение тока до 1 А, установив опорное напряжение до 0,5 В.
| Примечание: Ток обмотки может сильно отличаться от тока источника питания, поэтому не следует измерять ток на источнике питания, чтобы установить ограничение тока. Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя. |
Микросхема драйвера DRV8834 имеет максимальный постоянный ток 1,5 А на катушку, и в проведенных тестах эта плата была способна обеспечивать номинальный ток в течение многих минут без необходимости дополнительного охлаждения. DRV8834 может поддерживать пиковые токи до 2,2 А на катушку, но его защита от перегрузки по току может сработать при токах до 2 А, а фактический ток, который вы можете подать, зависит от того, насколько хорошо вы можете поддерживать микросхему в холодном состоянии. Печатная плата предназначена для отвода тепла от микросхемы, но для подачи более 1,5 А на катушку требуется радиатор или другой метод охлаждения.
| Эта плата может нагреться так, что можно получить ожог, задолго до того как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами. |
Обратите внимание, что ток, измеренный на источнике питания, как правило, не соответствует величине тока на обмотке. Так как напряжение, подаваемое на драйвер, может быть значительно выше напряжения на обмотке, то, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают в качестве переключаемого источника с пошаговым понижением питания). Кроме того, если напряжение питания намного выше необходимого двигателю уровня для достижения требуемого тока, то скважность будет очень низкой, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока). Кроме того, обратите внимание, что ток катушки является функцией установленного ограничения тока, но не обязательно равен настройке ограничения тока. Фактический ток через каждую катушку изменяется с каждым микрошагом. Смотрите спецификацию DRV8834 для получения дополнительной информации.
Схема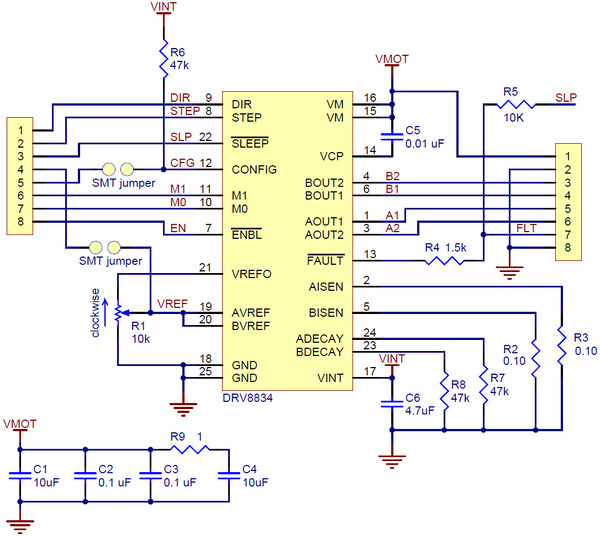
Эта схема также доступна в виде загружаемого PDF (105k pdf).
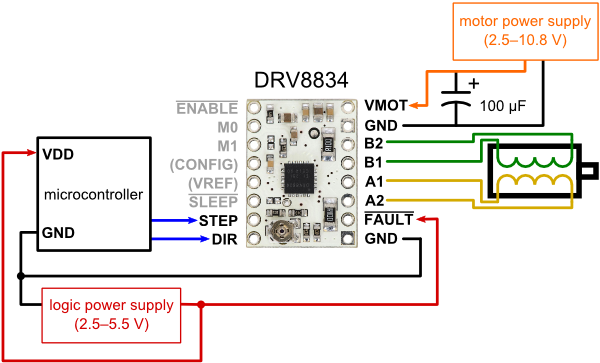
Ключевые различия между DRV8834 и A4988Драйвер шагового мотора Pololu на DRV8834 был разработан, чтобы быть максимально похожим на драйвер шагового мотора Pololu на A4988, и его можно использовать как замену платы A4988 во многих приложениях, поскольку он имеет тот же размер, распиновку и общий интерфейс управления. Однако следует отметить несколько различий между двумя модулями:
Таким образом, модуль DRV8834 достаточно похож на модуль A4988, поэтому минимальная схема подключения для A4988 является допустимым альтернативным способом подключения DRV8834 к микроконтроллеру:
| Артикул | 05030205 |











